Creating a robotic swimmer to measure complex fluid properties
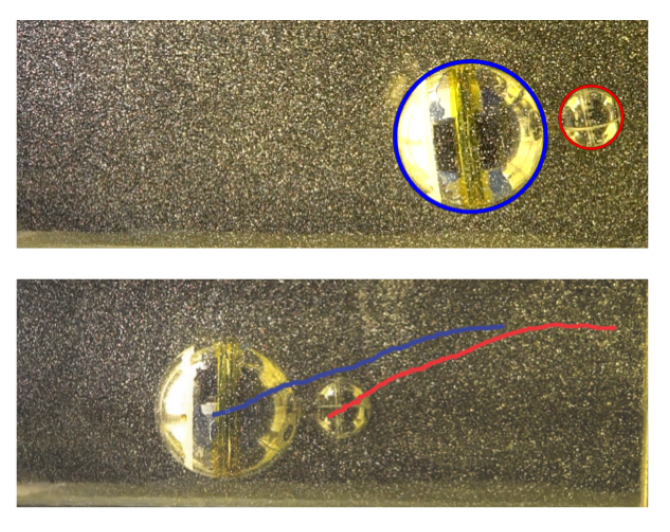 Mechanical swimmer propelling itself in an elastic fluid.Pictured above is the head and tail identification, and below, the trajectories in space of the head (blue) and tail (red), respectively.
Mechanical swimmer propelling itself in an elastic fluid.Pictured above is the head and tail identification, and below, the trajectories in space of the head (blue) and tail (red), respectively.This project builds upon the theoretical work presented in Binagia et al. (2021), where a model swimmer propelled by swirling flow in viscoelastic fluids was analyzed. Here, we design and construct an experimental robotic swimmer to directly test and validate those theoretical predictions. The robot, inspired by the two-sphere swimmer model, is capable of swimming in non-Newtonian fluids due to fluid elasticity, and serves as a ‘swimming rheometer’ to measure rheological properties of the fluid. We published this research in the Journal of Fluid Mechanics (Kroo et al., 2022) and wrote a patent for the swimmer design (Shaqfeh et al., 2024).